SUFFER‘11 (Small Unmanned Fast Field Environmental Robot ‘11)

With this knowledge in hand, I tried to design a vehicle that would capture this attitude, so that it wouldn't only be visible in the robots name, SUFFER‘11.
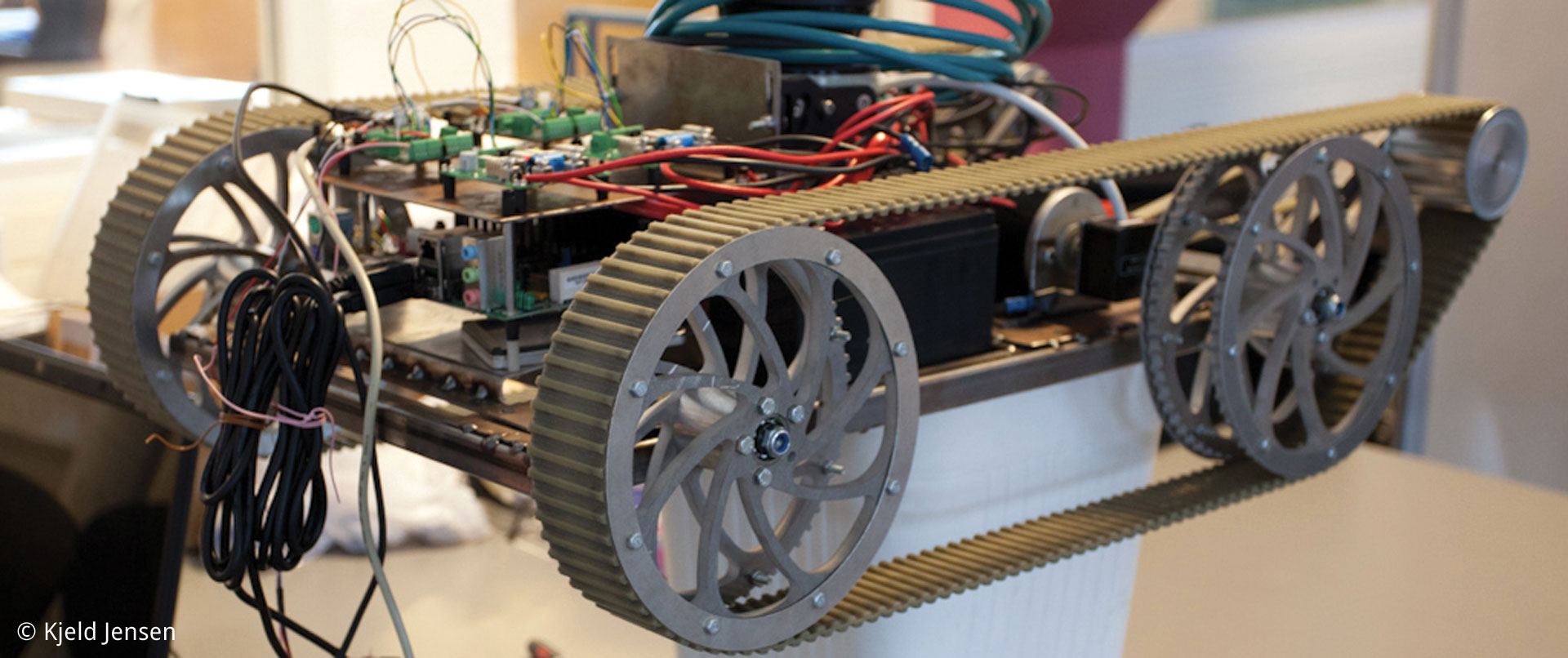
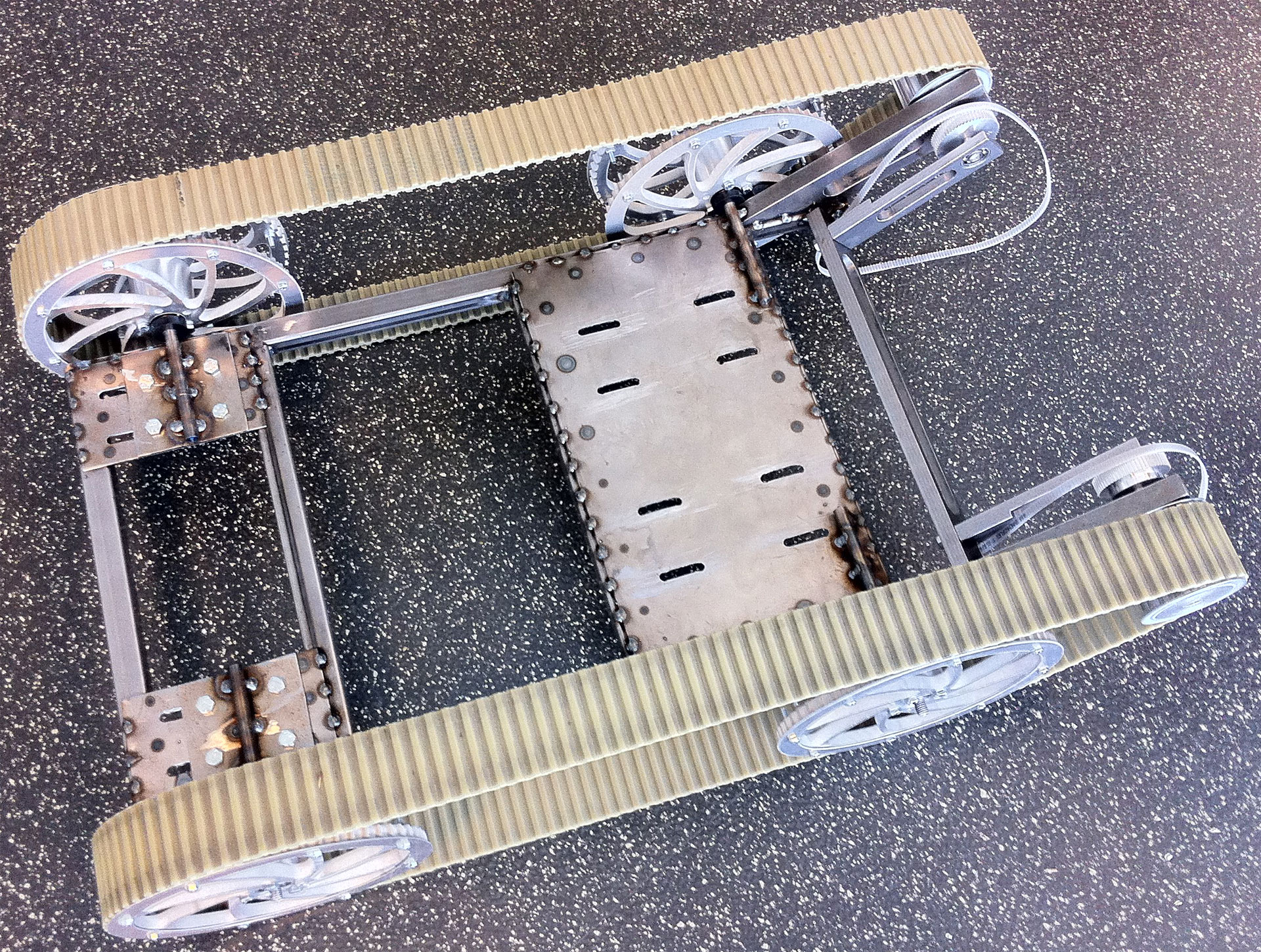
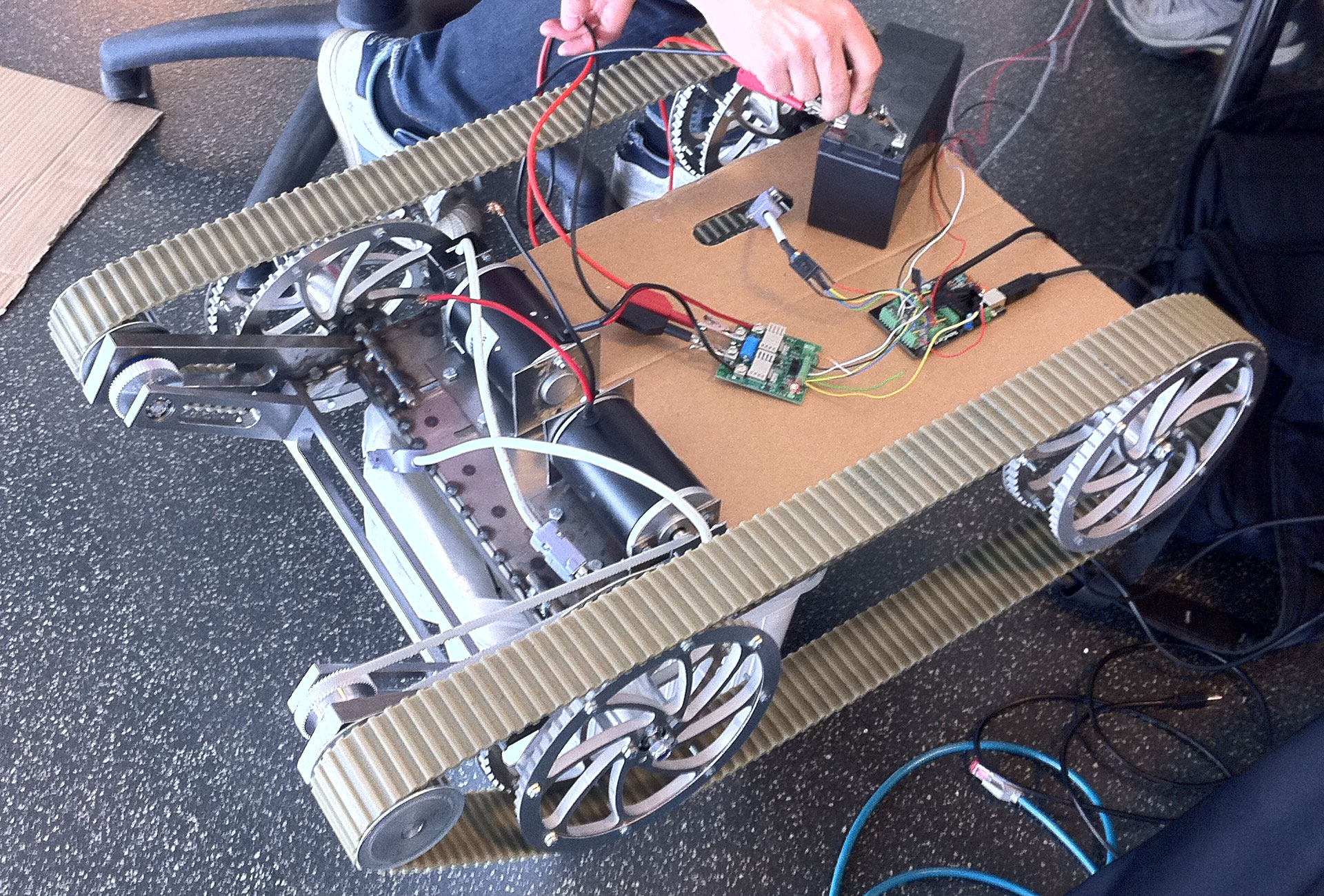
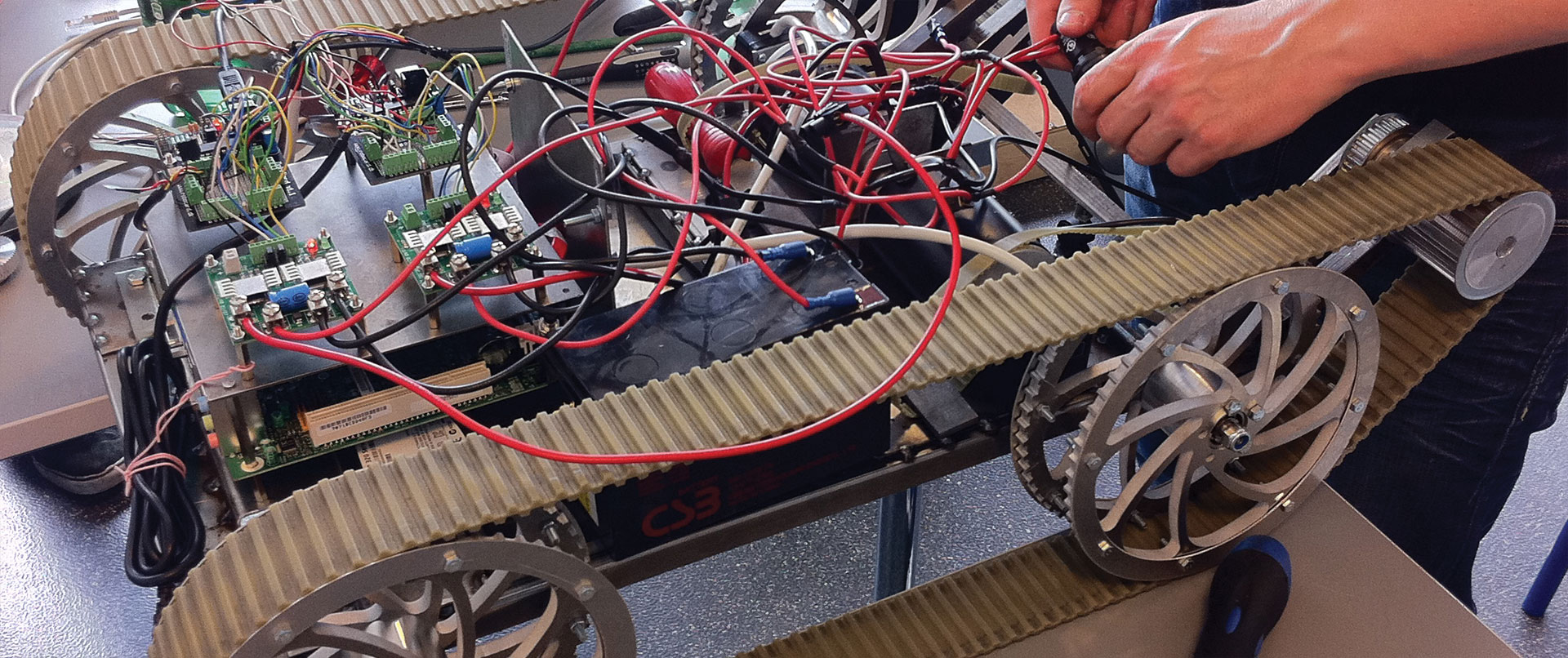
Because the robot would have this very “aggressive” attitude and should be kinda rough on the terrain, I decided that it of course should be constructed with a steel structure; however I wanted it to be slightly smaller than it appears here. The steel structure however was not supposed to be visible in the end, as it was the plan that SUFFER‘11 should have had a fiberglass cover, but this was never made due to time pressure towards the end.
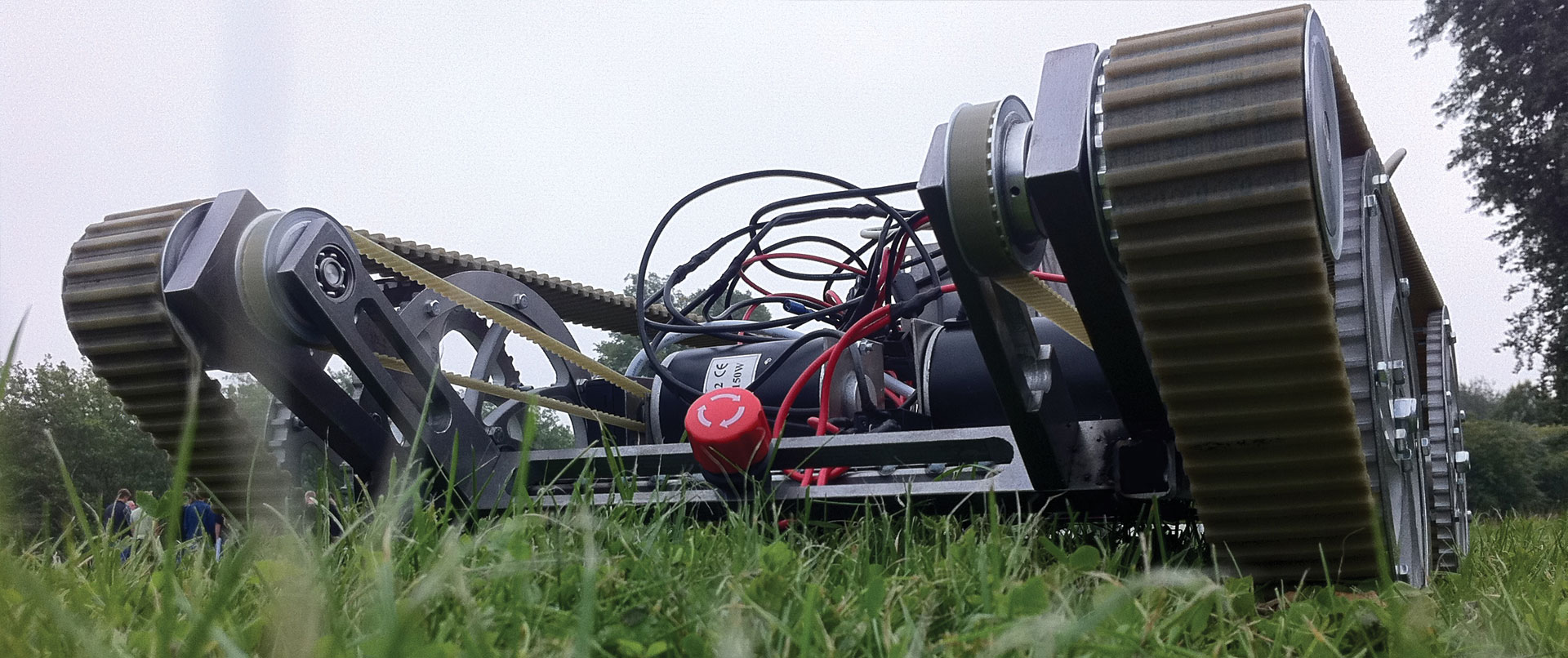
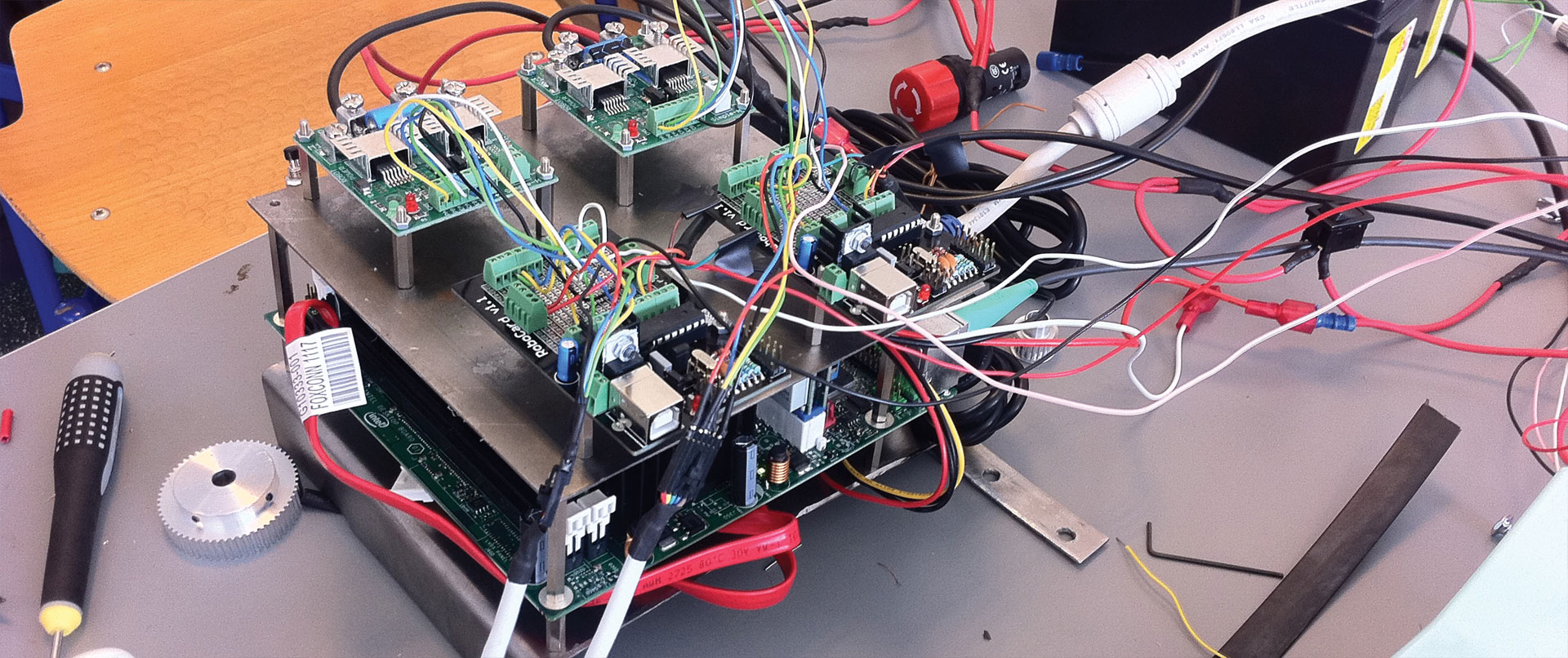
Beneath here you can see many pictures of the robot, from the beginning to the end of the project.






Project Details
In August 2011 I joined the IT Summer University at the Faculty of Engineering in Odense where there was just one task: Design and build a robot that autonomously can navigate through a corn maize.
I was assigned a group with 3 robotic engineering students. In this group I was the only one who knew anything about designing and building stuff, so naturally I was in charge of that on my own.
We decided as a group that we wanted to build a skid-steered tracked vehicle. The reason for this decision was that we wished to build a vehicle that was capable of conquering any terrain, making it's market bigger (in case it should be commercialized).
Important keywords for the project was:
- Engineering
- Industrial design
- Electronics / Programming
Similar Work
If you find this interesting, here are three other projects that might interest you as well...